維宏EtherCAT總線增強型驅動器在原WSDA系列通用型驅動器上開發,對通信速度、電機控制性能進行了優化升級。
一、通信速度大幅度提升
通信速度達到100Mbps,并且各軸之間擁有精準的同步性能(<<1us)。
二、驅動器算法升級
電機齒槽補償算法
電機齒槽轉矩補償,自動推定電機齒槽轉矩并補償,減小電機低速運行波動。
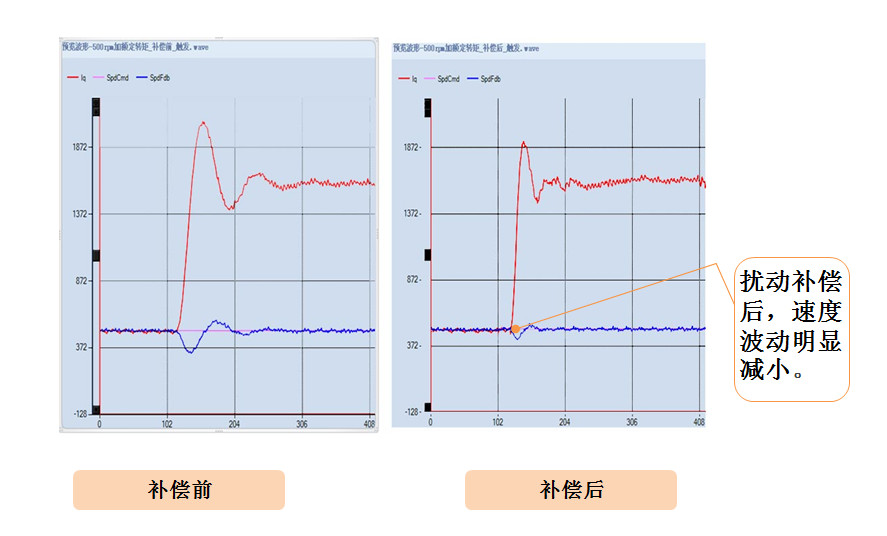
外部擾動快速補償算法
外部擾動快速補償功能,有效的減少了干擾轉矩的影響和降低了機械振動。
那么性能升級后的維智EtherCAT總線增強型驅動器在加工過程中效果如何呢?
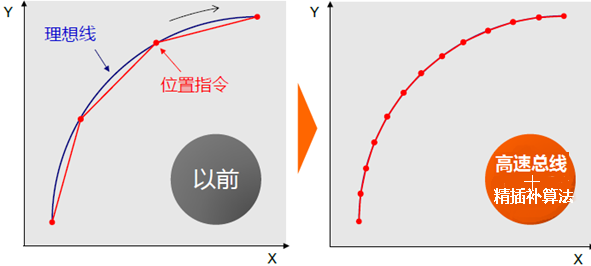
在激光切割設備中加工輪廓變形問題十分常見,維智EtherCAT總線增強型驅動器有專業對策可解決。
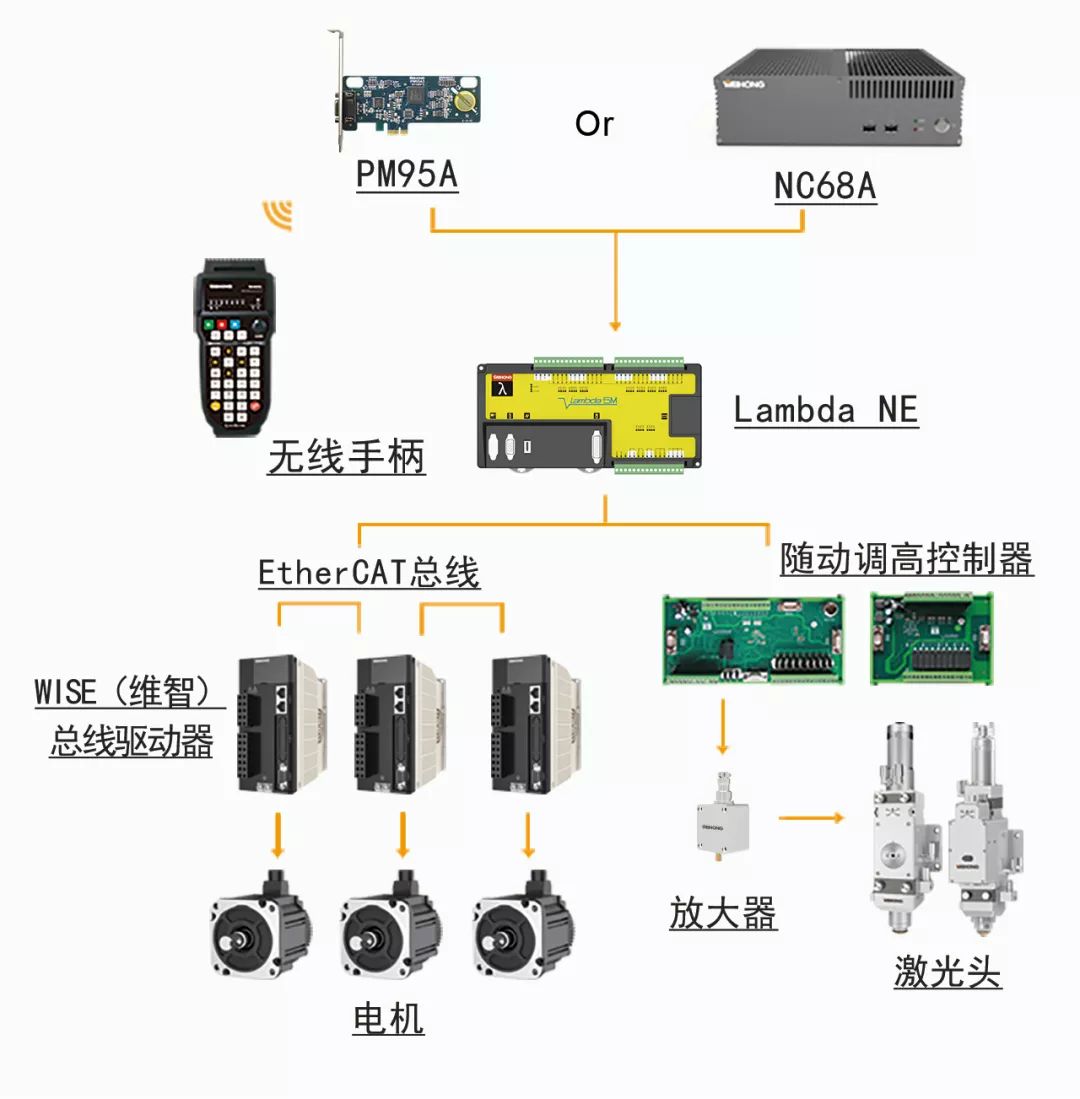
維宏在激光切割行業提供了成套的解決方案,包括控制系統、激光切割頭和維智伺服驅動器。
使用維宏EtherCAT整套解決方案加工的效果如下:
使用二次元對細節進行局部放大后可以看到,兩個工件在細節上有較大差距,左面三角形邊不直,呈弧形狀;右面三角形直角邊則沒有該現象。
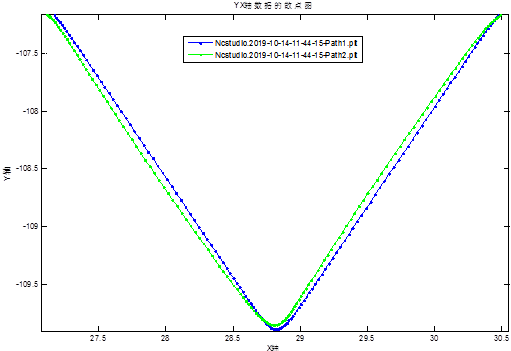
針對該案例中的輪廓變形問題,首先對驅動器加工軌跡進行采集:
綠線為指令軌跡,藍線為實際反饋軌跡,參考的軌跡散點圖如上圖所示,可以看出反饋軌跡和指令軌跡有較大的延遲,且反饋軌跡有小幅波動。
對于采集數據反饋的問題,維智EtherCAT總線增強型驅動器有針對性的對策可解決。
Top1:
由于機械材質和安裝的差異,設備上各傳動軸的機 械內應力、靜摩擦力等可能會不一致。如果設備中參與軌跡插補控制兩軸中的某一軸內應力或者靜摩擦力等更大,則會一定程度上消耗掉伺服轉矩,造成此軸加速變慢,從而導致加工輪廓變形。解決此類問題的思路主要是讓伺服電機多輸出一部分轉矩,以抵消作用于軸上的各種內力、外力。面對此類問題,一般是適當提高伺服增益,但在某些設備上由于機械剛性本身較低,系統增益提升較難。
維智EtherCAT總線增強型驅動器啟用外部擾動快速補償功能,可以減輕此類問題,從而改善位置偏差,達到減小輪廓變形的目的。
Top2:
機械共振問題對伺服最大的影響在于無法繼續提高伺服電機的響應性,從而使設備整體運行在比較低的響應狀態。
如果出現此類問題,除了在機械上優化外,可以通過伺服的調整來彌補。維智EtherCAT總線增強型驅動器有兩種方法實現:一種是打開自適應濾波器開關(Pr200設置為2),即可自動去共振功能,維智EtherCAT總線增強型驅動器有兩個自適應陷波濾波器,可同時自動抑制兩個共振點頻率 ;另一種是手動去除共振的方法,通過iMotion調試軟件中FFT功能測試出機械共振點頻率及強度,寫進第1和第2陷波濾波器參數中。共振問題得到抑制后,位置和速度增益一般還可以繼續提高,從而提高伺服電機的響應能力,減小位置偏差。
Top3:
輪廓的變形還有一種原因是電機齒槽轉矩的影響,雖然這種擾動轉矩較小,通常情況下可忽略,但在速度較低,且兩個軸軌跡插補運動時,造成兩軸之間位置偏差波動則會影響到加工件某些細節點處的輪廓,比如本案例中的尖角附近輪廓。
針對該問題,維智EtherCAT總線增強型驅動器使用電機齒槽轉矩補償功能,自動推斷齒槽轉矩并補償。
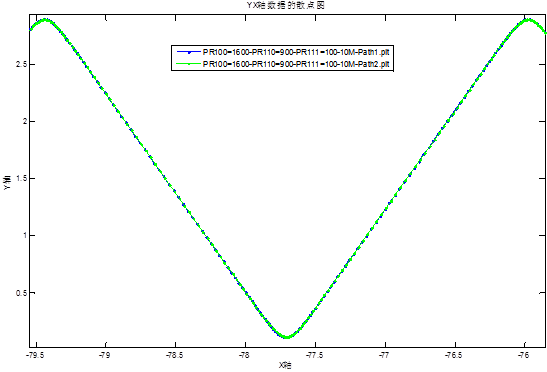
通過上述分析,并優化增益參數后,軌跡散點圖如下所示,可以看出實際軌跡與指令已基本吻合。
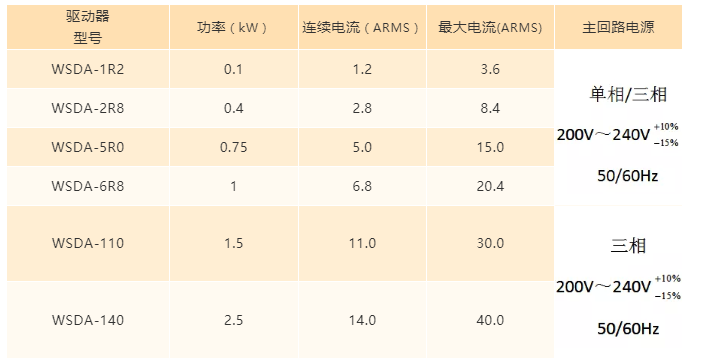
三、規格參數
控制回路電源: 單相 200V~240V,50/60Hz
除了激光切割行業,維智EtherCAT總線增強型驅動器還可廣泛應用于金屬雕銑、3C加工、水射流加工等領域。

EtherCAT作為一項高性能、高靈活性、低成本、易實現的工業以太網技術,由德國倍福研發,于2003年引入市場,并于2007年成為國際標準。在2007年引入我國后迅速發展,并被納入《國家智能制造標準體系建設指南》。